
- 採択企業
-
株式会社𠮷野家
設立:2014年3月(創業:1899年)
代表者:代表取締役社長 河村 泰貴
本社:東京都中央区日本橋箱崎町36番2号 Daiwaリバーゲート18階
資本金:1000万円
- 採択事業
-
使用後食器の浸水・ラッキング工程の自動化に向けたロボット開発
~生産性向上と、従業員の心理的負担の軽減の実現へ向けて~現在𠮷野家をはじめ、食器を扱う多くの店舗では従業員が手で、使用後の食器を浸水し、取り出しラッキングしている。心理的負担もかかるこの作業を軽減し、生産性と労働環境を改善するため、店舗でも稼働できる小型ロボットを開発する。
interview
導入の経緯
従業員は人がやることで、最大限に付加価値を生む調理や接客サービスに注力させたいと考えています。食器洗浄作業は人がやらなくても良い作業と考えており、できればなくすか、自動化したいと考えています。浸漬シンクの中は、徐々に汚れが蓄積して汚れて、人がそのような中に手を入れて食器を取り出すことには抵抗感を感じ、従業員の嫌な作業の一つとなっています。また、汚れたシンクの中では見えないために、食器等が破損していた場合は手を切ったり、怪我をするリスクもあります。
しかし、人が手でこの食器はどの食器だというのを判断しながら、一つ一つ掴み出せるのは、今までの認識があるからできることです。それを自動化するために、特別なロボットハンドが必要だと考えておりました。


実施した内容
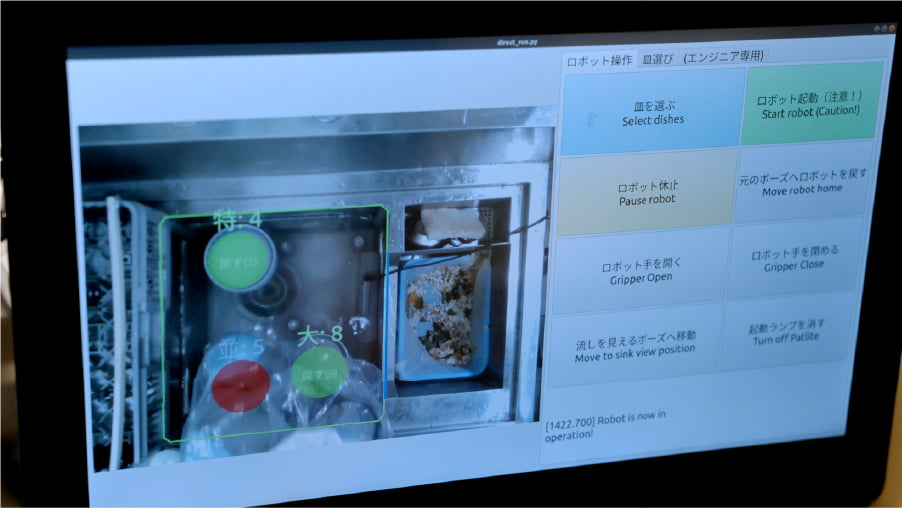
画像認識カメラと光学式の触覚センサーを活用し、把持制御を高精度化したロボットフィンガーハンドによる店舗食器洗浄作業の生産性向上を行いました。
導入したロボットハンドは、汚れて見えない浸漬槽の中、十何種類もの食器が色々な形で重なっている状況で、しっかり認識をします。そして、画像や触覚センサーから得られた情報をAIなどを駆使して処理、一つ一つ掴んで持ち上げ、その後ラックに並べます。シンクの中が見えないため、画像認識だけでは難しく、触覚センサーと、さらに持ち上げる指の形も工夫を重ね、実現しました。
また、厨房が狭いので、人と一緒に作業できるようにするためのスリム化や、周囲にぶつからないような動きの開発、そしてタッチパネルでの操作性などを向上し、店舗の特殊な環境に実装できる形になりました。

結果と改善点
ピークタイムに洗浄時間として必要になる時間が523秒から289秒に短縮できることが可能となりました。標準店舗で1日中稼働させることを想定した場合は、人時生産性は101.7%となることが見込まれます。
今後は、他店舗への横展開と共に、ロボットと人、どう工程を分けて作業をするのかというところを考えています。どのように沈めるのが1番効率が良いのかなど、ロボットと人の関係を築いていきたいです。
また今ロボットが行っている前工程、返却した食器を浸漬槽に沈めるまでを全自動化、そしてゆくゆくは壁側にスライドで動くような形にして、食器の返却作業からラッキングして洗浄機に入れるまでのところ、全てをロボットでやれればと考えています。


今後の展望
改善を始めるきっかけとしては、従業員の労働負荷の低減、特に今回の洗浄工程では従業員に手荒れさせないためにはどうするかとか、その辺りのことを改善したいということでスタートして、結果的には生産性も上がって、そして人手不足の部分にも貢献するといった形の改善になっています。
飲食業はまだまだ製造業に比べて生産性の面であったり、労働負荷の面でかなりレベル的には低い状態だと思います。それを飲食業を再定義する意味でも、製造業のレベルまで生産性を向上させ、労働負担も低減したいと考えています。


株式会社𠮷野家
未来創造研究所 未来施設・設計 部長 古田 勝己さま
未来創造研究所 未来施設・設計 課長 八重樫 路孝さま